
単振動のモデルは一定の状態で続く振動のため、実在世界には存在しません。ここでは、より実態に即した減衰していく振動について解説します。


1. 減衰振動のモデル
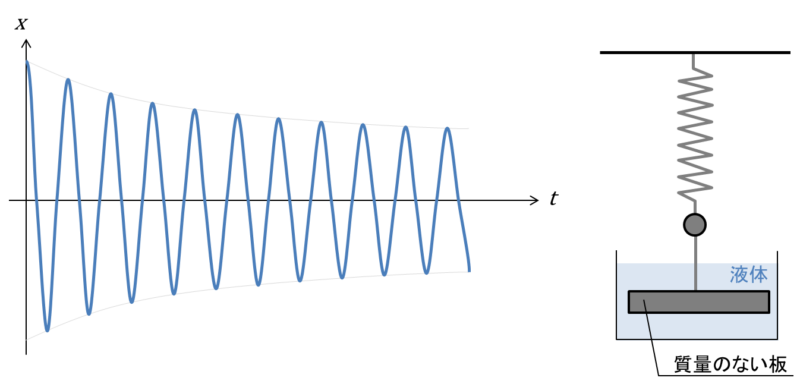
グラフに示すように、現実世界の振動では流体(空気や液体など)や固体の抵抗を受けて振動のエネルギーが失われ(厳密には熱エネルギーに変換されて散逸します)、減衰していきます。これを簡単なモデルで表わしたものを上の図に示しました。単振動で解説したバネと錘に”液体”と”質量のある板”を加えました。
減衰を大きくするには、液体の抵抗を大きくすればよく、そのためには質量のある板を大きくします。あるいは、液体を粘度の高いものに交換してもよいです(例えば、水から油に交換する)。
この流体を使って抵抗を生じさせて振動を減衰させる装置を「ダッシュポット」や「ダンパー」と呼びます。
2. 減衰振動の運動方程式
1.で解説した抵抗は速度\(v\)に比例します。この抵抗力を\(-mcv\)(\(c\):定数、\(v\):速度)とし、復元力を\(-kx=-m\omega^2x\)とするとニュートンの運動方程式は次のように表せます。
\[
m\frac{\displaystyle d^2x}{\displaystyle dt^2}=-kx-2mc\frac{\displaystyle x}{\displaystyle dt}=-m\omega^2 x-2mc\frac{\displaystyle dx}{\displaystyle dt}
\]
上式を整理すると次のようになります。
\[
\frac{\displaystyle d^2x}{\displaystyle d^2 t}+2c\frac{\displaystyle dx}{\displaystyle dt}+\omega^2 x=0
\]
減衰の大小で次の3つの定義がされており、一般解が導かれています。
- 減衰振動:抵抗が小さい場合(\(\omega>c\))
\[x=Ae^{-ct}cos[\sqrt{\omega^2-c^2}t+\alpha]\] - 過減衰 :抵抗が大きく振動しない場合(\(\omega<c\))
\[x=Ae^{-(c-\beta)t}+Be^{-(c+\beta)t},\,\,\beta=\sqrt{c^2-\omega^2}\] - 臨界減衰:減衰振動と過減衰の間(\(\omega=c\))
\[x=(A+Bt)e^{-ct}\]
ここで、\(A,B,\alpha\)は任意の定数です。
自動車のサスペンションはこの過減衰~臨界減衰で設定されている形となっています。闇雲にダンパーの抵抗を大きくすると路面からの突き上げが大きくなってしまうので、バランスが大事なんですね。